Why do we need Fly by Wire? Is it just electronic control instead of conventional ways of controlling an aircraft and having flashy big screens and hundreds of buttons all over the cockpit?? Or is there something else??
There's certainly more.. Fly by wire has a lot of advantages. There is improved flight handling, operating within the flight envelope, reduced maintenance cost and weight. Safety improvements too.
So, how is it all done?
We know that there are both primary and secondary control surfaces to be managed. From the earlier post, its also known that they are controlled by a computer too. The advantage is that there is redundancy at all levels - control surfaces are redundant, computers are redundant, power supplies to these computers are redundant too. There is always a dissimilarity in the hardware and software used on the flight computers so that the common mode failures are eliminated.
The pilot's demands go to the computers. The word "Computer" is so generic here and it is actually a combination of multiple systems together.There are three units within it:

2 Elevator and Aileron Computers (ELAC)
3 Spoiler and Elevator Computers (SEC)
2 Flight Augmentation Computers (FAC)
These computers manage the electrical signaling. Two computers are dedicated to data handling from the control computers for indication, warnings, maintenance and recording purposes.
Thus we have 7 computers to handle the signaling with ELAC using Motorola 68000 IC, SEC using the first of X86 based processors, the 8086 and FAC using the 80286. Can't stop thinking how small and low performance devices these IC's are compared to the Gigahertz processors of today ! Even then,they manage such a huge aircraft !
Different software languages are used for each channel. Popular ones being C and Assembly level languages and usually another custom language developed by the aircraft manufacturer.
Each of this computer is capable of detecting errors in its operations, stop its control over the surface it manages and interrupt the other computer that he is not controlling the surface anymore. However, all the computers will be generating the control signals that are necessary while ONLY one of them is actually controlling it.
The architecture of the FBW System is as shown in the diagram. SFCC is the Slat and Flap Control Computer.
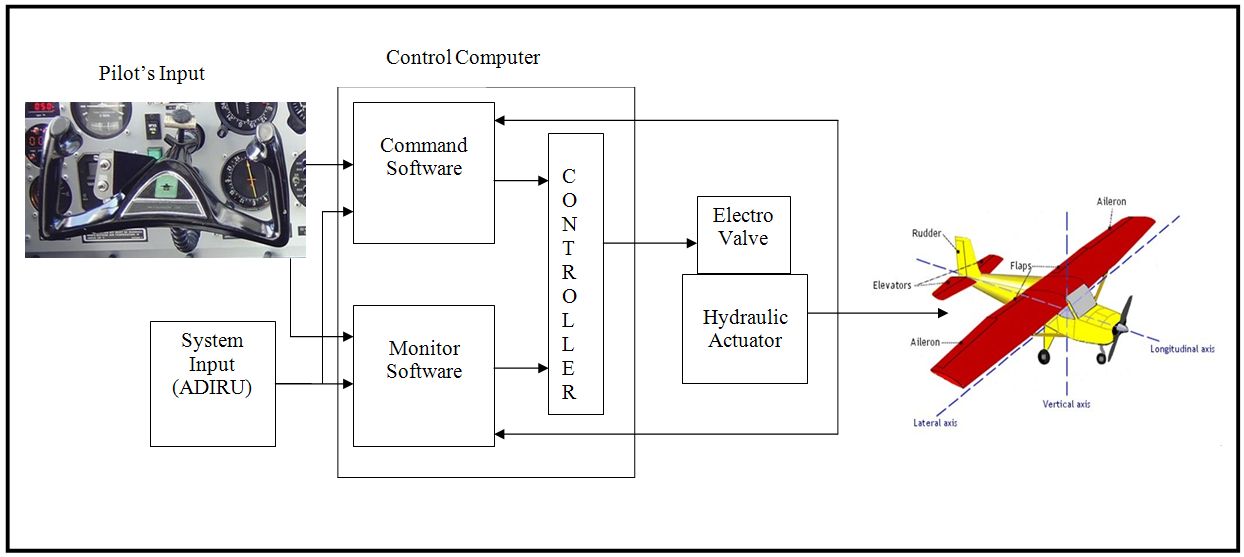
The architecture of each of the ELAC/SEC/FLCC is as shown.
There are two parts, Control and Monitor. Control unit is responsible for generating the electrical signals while the monitor is constantly reading the mechanical movements of the parts. Since all of us are pretty good with drawing and developing our own algorithms and architectures, I'm not going to talk of every single little detail.
At last, when you see both the pictures and try to put the structure of each computer into the FBW architecture and imagine the bigger system in mind, you can see how large and complex the whole of Fly-By-Wire System is :)
After going through all this architectures and all of the technical blah-blah, I'm sure there is a big mystery in your mind :)
What does this all mean to me when i fly ??? !!!
Well, the FBW System will not allow the plane to do manoeuvres which cross certain limits when considering a commercial aircraft. It WILL NOT allow the pilot to pitch more than 15 degrees while in flight and pitch only up to 30 degrees while landing, not bank more than 33 degrees at any point of time so that your drink that you paid for will not spill over you.
Even if the pilot tries to bank your plane to more than 33 degrees, the plane may bank for a while until it has processed that the banking angle is out of limits and the system automatically reduces the bank angle.There are a whole set of rules that are hard coded into the system so that your flight is as comfortable as possible.
This Architecture speaks of how to keep the plane within the operating limits to make sure the passengers enjoy their flight over the clouds. But, there is another much more interesting face to this.How can this be used to achieve the impossible ?? Any guesses of what i am talking about ?
 Anyway, coming back, every design evolves as time passes by. So is the case with aviation. During the early few years, the airplanes that were built were very small and very very simple. It was just a petrol engine with blades at the front and an airframe attached to it. Now aviators wanted a slightly bigger and a bit more features added. Then came the idea of using pulleys and cable links which were added to manage the control surfaces. But trust me, it took Arnold Schwarzenegger's strength to move the pulleys and cables to operate these machines, that too when flying high above the ground and winds hitting you at hundreds of kilometers per hour!! But somehow the pilots handled it.
Anyway, coming back, every design evolves as time passes by. So is the case with aviation. During the early few years, the airplanes that were built were very small and very very simple. It was just a petrol engine with blades at the front and an airframe attached to it. Now aviators wanted a slightly bigger and a bit more features added. Then came the idea of using pulleys and cable links which were added to manage the control surfaces. But trust me, it took Arnold Schwarzenegger's strength to move the pulleys and cables to operate these machines, that too when flying high above the ground and winds hitting you at hundreds of kilometers per hour!! But somehow the pilots handled it. 














{kind=link}